Complete Guide to Valve Torque and Actuator Selection
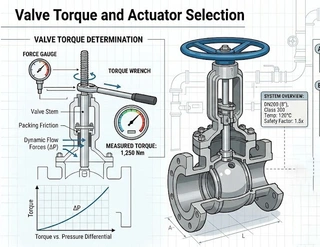
In the field of industrial automation, valve torque is a fundamental yet critically important concept. Simply put, valve torque is the rotational force required to open or close a valve. You can think of it as the force used when turning a door handle or opening a bottle of mineral water—except that the “bottle cap” of an industrial valve is much larger, and the force required is correspondingly much greater.
The reason valve torque is so important is that it directly determines the selection of the actuator. The actuator is like the “engine” of the valve, responsible for providing sufficient power to drive the valve. If the actuator does not provide enough force, the valve will not move; if the force is too great, it may damage the valve. Therefore, understanding torque is the first step in ensuring the proper operation of the entire system.
Three Basic Types of Valve Torque
During operation, the torque requirement of a valve is not constant. Depending on the valve's state, torque can be divided into three main types:
1. Breakaway Torque (Opening Torque)
This is the torque required for the valve to start moving from a completely stationary state. Because there is significant static friction between sealing surfaces when the valve is closed, combined with the effect of medium pressure, breakaway torque is usually the largest of the three types. According to practical data, breakaway torque generally accounts for 40% to 60% of the total torque.
2. Running Torque
Once the valve starts moving, the torque required to maintain continuous operation decreases significantly. This is because static friction is converted into dynamic friction, reducing resistance. Running torque typically accounts for 20% to 30% of the total torque.
3. Seating Torque (Closing Torque)
When the valve approaches the fully closed position, additional force is required to press the sealing surfaces tightly together to ensure a leak-free seal. At this stage, the torque demand increases again, typically accounting for 20% to 30% of the total torque.
Understanding the differences among these three types of torque is very important, because when selecting an actuator, it must be ensured that its output torque can cover the maximum value among these three operating conditions.
Maximum Allowable Stem Torque (MAST)
In addition to the torque required by the valve itself, there is another key parameter that must be considered—the Maximum Allowable Stem Torque (MAST). This refers to the maximum torque that the valve can withstand without sustaining damage.
MAST is a safety red line that must not be exceeded. Under no circumstances should the actuator's maximum output torque exceed MAST, otherwise it may lead to stem breakage, sealing surface damage, or other serious failures. Although manual actuators generally do not produce excessive torque, special attention must be paid when selecting electric, pneumatic, or hydraulic actuators.
In practical engineering, it is recommended to reserve a safety margin of approximately 25% based on the calculated required torque. For example, if the valve requires 125 in-lb of torque for closing, the actuator should be selected based on 150 in-lb. This safety margin can accommodate uncertainties such as calculation errors, wear, and pressure fluctuations, thereby improving system reliability.
Key Factors Affecting Valve Torque
The calculation of valve torque cannot be simplified into a universal formula, because it is influenced by multiple factors:
1. Valve Type and Structure
Different types of valves have significantly different torque characteristics due to variations in sealing structures and friction properties. Ball valves, butterfly valves, gate valves, and globe valves all have different torque requirements. For example:
- Soft-seated butterfly valves: Require relatively large torque under on/off conditions, but relatively smaller torque under throttling conditions
- Metal-seated ball valves: Usually require relatively large torque under both on/off and throttling conditions
2. Sealing Materials
Sealing materials have a very significant impact on torque. Compared with metal seals, soft sealing materials (such as PTFE and EPDM) generally require much lower breakaway torque. This is because soft sealing materials are more easily deformed and have lower friction between sealing surfaces.
3. Medium Characteristics
The type, temperature, and pressure of the medium all affect torque requirements:
- Medium type: Liquid media may generate hydrodynamic torque in butterfly valves, while gas media exhibit different sealing force characteristics
- Medium temperature: High temperatures can cause sealing materials to expand, increasing friction and torque requirements; temperature changes also affect thermal expansion behavior of materials
- Pressure differential: The greater the pressure difference across the valve, the higher the torque required for sealing and operation
4. Actuation Speed
The faster the actuator operates, the higher the torque margin usually required. This is because rapid operation generates greater inertial forces and dynamic effects.
5. Flow Direction and Installation Method
The flow direction of the valve (unidirectional or bidirectional) and the connection type (wafer, lug, or flanged) can also affect torque.
Torque Requirements Under Different Operating Conditions
In practical applications, valve operating conditions are mainly divided into two types, and their torque requirements differ significantly:
1. On/Off Service (Two-Position Control)
Under this condition, the valve only needs to switch between fully open and fully closed positions and does not need to stop at intermediate positions. Therefore, the torque requirement is relatively simple, mainly overcoming static friction during startup and sealing force during closing.
2. Modulating Service (Continuous Control)
Modulating service requires the valve to accurately stop at any intermediate position and resist hydrodynamic forces. This means the actuator must continuously output torque to maintain the valve position, and therefore usually requires greater torque capability than on/off service.
Types of Actuators and Torque Output
According to the power source, actuators are mainly divided into the following types:
1. Manual Actuators
Including handwheels, levers, and gear operators. These actuators rely on human force and have limited torque output, generally not exceeding MAST. However, for large valves, gearboxes may be required to amplify human torque.
2. Electric Actuators
Electric actuators directly output rotational torque, usually rated in Nm or lb-in. Their advantages include high control accuracy, low energy consumption, and easy automation, making them suitable for applications requiring precise control and long-term operation.
When selecting electric actuators, attention should be paid to rated output torque, starting torque, and overload protection capability. The torque output of the actuator should cover the maximum torque required by the valve while maintaining sufficient safety margin.
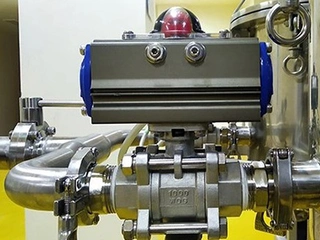
3. Pneumatic Actuators
Pneumatic actuators rely on compressed air (typically 60–100 psi) to generate driving force, which is converted into torque output through cylinder mechanisms such as scotch yoke or rack-and-pinion systems. Their advantages include fast response, simple structure, and excellent explosion-proof performance, making them suitable for applications with high safety requirements.
It should be noted that the torque output of pneumatic actuators is directly related to the air supply pressure. When selecting, the torque output under the minimum air supply pressure must be considered, rather than the maximum value under rated pressure.
4. Hydraulic Actuators
Hydraulic actuators use hydraulic oil as the power medium and can generate very large output torque, making them suitable for large valves or high differential pressure applications. They offer high torque control precision but have relatively complex systems and higher maintenance costs.
Practical Steps for Actuator Selection
Based on the above knowledge, the standard process for actuator selection is as follows:
1. Collect Valve Parameters
Obtain the following information from the valve manufacturer:
Valve model and size (DN or NPS)
Maximum working pressure
Medium type and temperature range
Sealing material type
Flow direction characteristics (unidirectional or bidirectional)
Connection type
2. Obtain Torque Data
Most valve manufacturers provide the following torque parameters:
Breakaway torque
Running torque
Seating torque
Maximum Allowable Stem Torque (MAST)
If the manufacturer does not provide detailed data, operating condition parameters can be supplied to request torque calculations. Most manufacturers provide this service free of charge.
3. Apply Safety Factor
Based on the torque data provided by the manufacturer, apply a safety factor (usually 1.25 to 1.5, i.e., 25% to 50% margin). For example:
Breakaway torque provided: 1000 Nm
After applying 1.25 safety factor: 1250 Nm
Actuator rated output torque should be ≥1250 Nm
4. Verify Full-Stroke Torque
Ensure that the actuator's output torque throughout the full stroke is greater than the corresponding valve requirements. Some actuators may experience reduced torque output at the ends of the stroke (fully open or fully closed positions), which requires special attention.
5. Check Other Parameters
In addition to torque matching, the following must also be confirmed:
Electrical parameters (voltage, power, protection rating)
Mechanical interface (flange dimensions, stem size)
Control mode (on/off, modulating, bus communication)
Environmental adaptability (explosion-proof, protection rating, temperature range)
6. Documentation and Archiving
Record the selection calculation process and results as part of the equipment documentation. This is very useful for future maintenance, replacement, or troubleshooting.
Conclusion
Valve torque and actuator selection is a technical task that requires comprehensive consideration of multiple factors. The key points include:
- Understanding the three basic types of torque: breakaway, running, and seating torque, ensuring the actuator can cover the maximum value
- Respecting the MAST limit: actuator output must never exceed the maximum allowable stem torque
- Applying a safety factor: reserve a 25%–50% safety margin based on calculated torque
- Considering operating condition differences: modulating service usually requires greater torque than on/off service
- Obtaining manufacturer data: do not rely on general formulas; be sure to obtain accurate torque parameters
- Avoiding common mistakes: neither undersize (leading to failure to operate) nor oversize (causing damage)
Proper actuator selection not only ensures normal valve operation but also extends equipment life, reduces maintenance costs, and improves system safety. Whether for new projects or retrofit upgrades, it is essential to start with an accurate understanding of valve torque and make scientifically sound and reasonable selections.
Send your message to this supplier
Related Articles from the Supplier



A Complete Guide to Diaphragm Valve Maintenance
- Jan 06, 2026

Complete Guide to Safety Valve Selection
- Feb 12, 2026

Complete Guide to Three-Way Plug Valve
- May 29, 2026

An Complete Guide to Monoflange Valve
- Apr 16, 2026
A Complete Guide to Balanced Bellows Safety Valve
- May 21, 2026
Related Articles from China Manufacturers

A Complete Guide to Ball Valve Maintenance
- Aug 30, 2024


Complete Guide to Cryogenic Ball Valve Maintenance
- Aug 14, 2024
Complete Guide to Pneumatic Ball Valve Selection
- Feb 26, 2026
A Complete Guide to High Pressure Control Valve
- Jul 16, 2024



Related Products Mentioned in the Article
Zhejiang Kosen Valve Co., Ltd.
- https://www.kosenvalve.com/
- Business Type: Industry & Trading, Manufacturer,
Supplier Website
Source: https://www.kosenvalve.com/media-hub/complete-guide-to-valve-torque-and-actuator-selection.html